

Robotik yürüme cihazları inme tedavisinde son yıllarda gittikçe kullanımı artan ve rehabilitasyon başarısını olumlu yönde etkileyen araçlardır.
İnmenin en önemli sonuçlarından biri kişinin hareket kabiliyetinin azalmasıdır. İnmeden 1 yıl sonra tuvalet, giyinme, beslenme gibi kendine bakım aktivitelerinde bağımsızlığa ulaşan hasta oranı %60-80 civarındadır. 2008 yılındaki bir bilimsel araştırmaya göre inme hastalarının yaklaşık yarısı hastaneden tekerlekli sandalye ile taburcu olurken %15’den azı iç mekanlarda yardımsız yürüyebilmekte, %10’dan azı dışarıda yürüyebilmekte ve %5’ten azı merdiven çıkabilmektedir.
Neden robotik rehabilitasyon?
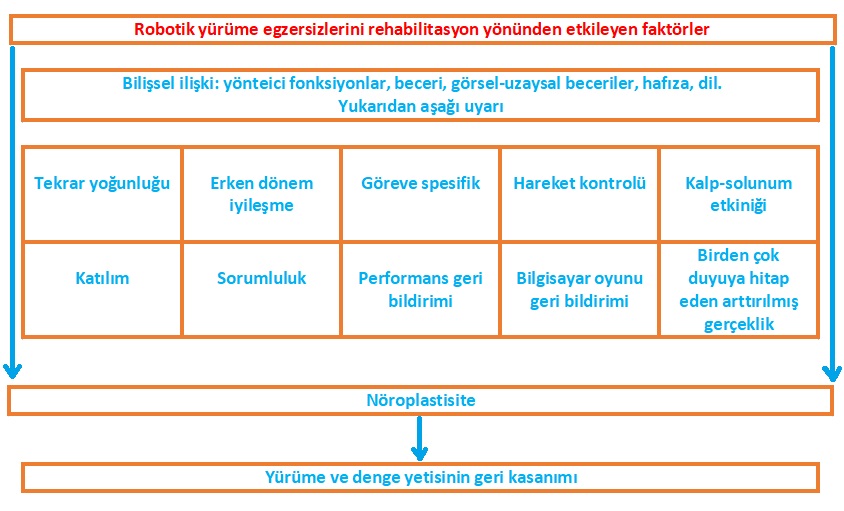
Yaşlanan nüfus ve akut dönem inme tedavisindeki gelişmeler nedeniyle fonksiyonel kısıtlılıkla yaşamına devam eden inme hastası her geçen yıl artmaktadır. Bu nedenle inme rehabilitasyonunun daha başarılı sonuçlar verebilmesi için tüm dünyada yoğun bir çaba vardır. Erken dönemde yoğun rehabilitasyon ve yeni teknolojilerin kullanımı bu açıdan öne çıkan yaklaşımlardır. Güncel bilimsel verilere göre erken dönemde, yoğun, göreve spesifik, birden fazla duyunun uyarıldığı ve hem beyinden uç organlara yukarıdan aşağı hem de aşağıdan yukarı entegrasyonu içererek beyin plastisitesini güçlendiren rehabilitasyon tedavileri daha etkili olmaktadır. İnmeden sonraki ilk 3 ay beyin plastisitesinin en güçlü olduğu ve yoğun rehabilitasyonun en faydalı olduğu dönemdir. Yukarıdan aşağı ve aşağıdan yukarıya entegrasyona örnek olarak non-invazif beyin stimülasyonu (ör: TMS) ile robotik tedavinin kombine kullanımı verilebilir.
Nöroplastisite iyileşme mekanizmaları ve fonksiyonel uyum süreçlerini tetikler ve sinir hücreleri organizasyonunda genel değişiklikler oluşturabilir. Nöroplastisite uyarılma/baskılanma dengesi, beyin kabuğu haritalarının genişliği ve aktivasyonu, yapısal yeniden şekillenme gibi kavramlarla ilişkilidir.
Robotik rehabilitasyon bahsettiğimiz tedavi ilkeleri ile entegre bir şekilde uygulandığında inme hastalarının belirli yetilerini geliştirebilmektedir.
Robotik yürüme cihazları
Tüm dünyada robotik rehabilitasyon ve robotik fizik tedavi için çok sayıda farklı makine üretilmekte ve denenmektedir. Bu cihazlar vücuda uyguladıkları harekete göre sınıflanabilir. Örneğin dış iskelet tipi cihazlar yürüme boyunca kalça, diz ve ayak bileği eklemlerini hareket ettirir. “Uç-efektör” cihazlar ise genelde bir destek üzerinde sadece ayağa hareket yaptırır ve bu şekilde yürümenin salınım ve basma fazlarını simüle eder. Robotik cihazlar için diğer bir sınıflama ise hastanın sabit bir ortamda hareket etmesi veya çevrede gezinebilmesi prensibine göre yapılır. Buna göre cihazlar statik ve dinamik robotik cihazlar olarak ikiye ayrılabilir.
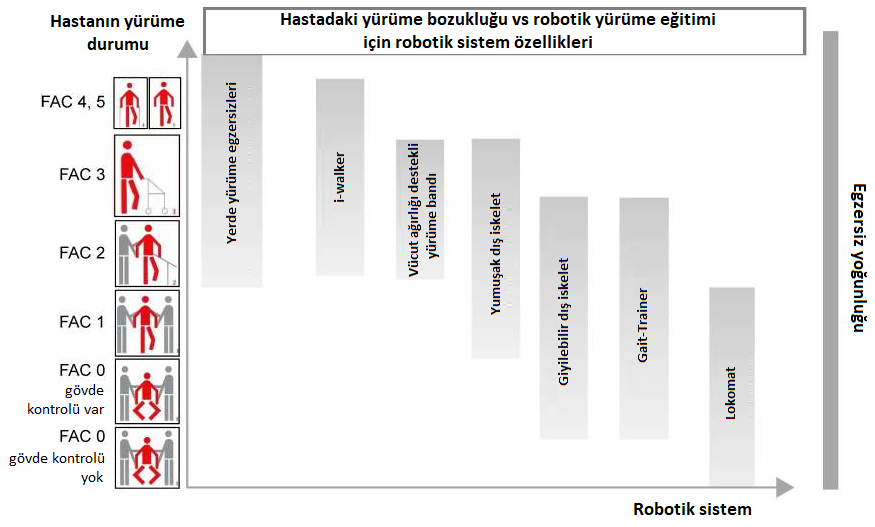
Statik cihazlar yani hastanın hareketi sabit bir yerde gerçekleştirdiği robotik rehabilitasyonun en sık kullanılan tipleri bir çeşit robotik dış iskelet olan Lokomat ile uç-efektör cihazları olan Gait Trainer ve G-EO’dur.
Lokomat vücut ağırlığı askı sistemi ve yürüme bandı ile kombine şekilde çalışan bir robotik yürüme ortezidir. Vücut ağırlığı destekli yürüme bandından esas farkı hastanın bacak eklemlerinin önceden programlanmış bir paternde hareket ettirilmesidir.
Gait trainer cihazında ayak plakaları yardımıyla yürümenin basma ve salınım fazlarının simülasyonu yapılır. Ayakların her zaman platforma temas halinde olması bu sistemin ayırt edici özelliğidir.
Son yıllarda dinamik dış iskelet çeşitlerinin geliştirilmesi için yoğun çabalar vardır. Bu robotlar nörorehabilitasyon dışında askeri uygulamalar (askerlerin hareket kabiliyetini arttırma) amacıyla da kullanılabilmektedir. Robotik kalça-diz-ayak bileği dış iskelet ortezleri ticari olarak mevcuttur ve inme hastalarının tekrar ayağa kalkması ve yürümesi için kullanılabilmektedir. Şimdilik hemen tüm fonksiyonel dış iskeletler dengenin sağlanması için koltuk değneği gibi ek desteklere gereksinim duymaktadır.
Robotik fizik tedavinin yararları
Robotik sistemler göreve spesifik hareketlerin terapist gözetiminde yoğun bir şekilde uygulanmasını kolaylaştırır. Daha geleneksel rehabilitasyon yöntemlerinin etkisini kuvvetlendirir.
İnmeden sonra tek başına veya bir kişinin yardımıyla ayakta duramayan hastalar için robotik fizik tedavi erken dönemde yoğun ve güvenli yürüme rehabilitasyonu uygulanmasını mümkün kılar. Robotik cihazlarla hastanın ağırlığı desteklenir. Fizyoterapistin iş yükü azalır, gövdeyi desteklemek veya felçli bacağa pozisyon verme gibi işleri cihaz yapar. Fizyoterapist terapinin fonksiyonel kısmına yoğunlaşabilir. Robotik rehabilitasyonun sağladığı hareketlerle inme hastası erken dönemde kalp ve solunum kapasitesi anlamında form kazanır. Ayağa kalkmada robotik cihazlardan yararlanmak, vücudun normalde yer çekimine karşı duran kaslarının aşırı kasılmasını (spastisiteyi) önler.
Robotik cihazların bir avantajı da hasta performansının çeşitli yönlerden objektif ölçümü ve izlemine izin vermesidir. Eklem hareket açıklığı, hareket hızı, hareketin akıcılığı, kuvvet gibi parametreler ölçülebilir.
Robotik rehabilitasyonun klasik fizik tedavi ile kombinasyonu inme sonrasında bağımsız yürümenin geri kazanılmasına katkı sağlar. Robotik tedavi için en uygun başlama zamanı, tedavi süresi ve sıklığı hala tartışılan konular olsa da, inmeden sonraki ilk 3 ayın en çok fayda gördüğü bilinmektedir. Robotik rehabilitasyonun inme tedavisinde tek başına bir çözüm olmadığı bilinmelidir. Robotik tedaviler geniş rehabilitasyon yöntemleri içinde faydalı bir araç olarak kullanımdadır.
Kaynak:
- Morone G, Paolucci S, Cherubini A, et al. Robot-assisted gait training for stroke patients: current state of the art and perspectives of robotics. Neuropsychiatr Dis Treat. 2017;13:1303-1311. Published 2017 May 15.

